
We’re all familiar with what a robot looks like. Whether it be Star War’s C3PO or an actual robotic arm on a automobile assembly line they’re made of metal and gears and while they can sometimes move quickly they are never agile or flexible. The robots you see on ‘BattleBots’ have joints and manipulators that are powered by little electric motors that are costly, use a lot of power and are prone to break downs.
For years now scientists and engineers have been trying to develop ‘artificial muscles’ that would provide greater strength and dexterity while at the same time being lower cost and more efficient. Various different materials have been tried. Some, such as Shaped Memory Alloys or twisted polymer fibers were found to be energy inefficient (about 2%), slow and plagued by hysteresis, that is repeated on-off cycling does not always bring them back to their original starting point.
High-pressure actuators, either pneumatic or hydraulic, have also been widely studied but their contraction ratios are limited to about 35%, in other words they can only pull so much. Furthermore the use of high pressure can be dangerous.
Now a team of engineers at Harvard University’s Wyss Institute for Biologically Inspired Engineering is trying a new track, low pressure vacuum rather than high pressure. The team consists of Shuguang Li, Daniel Vogt, Daniela Rus and Robert Wood and they have developed a basic design of a muscle that they call a Vacuum-Actuated Muscle Inspired Pneumatic Structure (VAMPS). According to the engineers VAMPS are strong (Power density greater than 2kW/kg), lightweight, are able to contract to 10% of their initial length and can be cheaply fabricated by a variety of techniques.
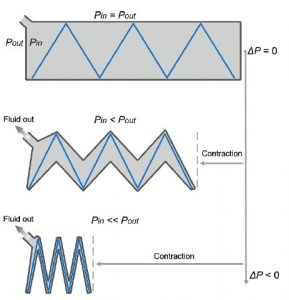
The figure below illustrates the operation of the VAMPS. At the top, the Pin=Pout drawing, the triangular line represents a skeletonal structure that is wrapped inside a skin made of thermoplastic polyurethane coated nylon fabric which is fluid tight. As Pin<Pout, the middle drawing, the muscle begins to contract and as Pin gets close to a vacuum the VAPMS reaches its full contraction.
These VAMPS can then be used as buildings blocks to construct entire robotic manipulators and limbs that are known as Fluid-driven Origami-inspired Artificial Muscles (FOAMs). These FOAMs can then be designed to fulfill a large variety of different tasks. One of the manipulators that have been designed and constructed by the Harvard group is shown in the Image at the top of this post while another is shown below, notice the one below is grabbing and lifting an automobile tire.

By the way the team at Wyss is being partially funded by the Defense Advanced Research Projects Agency or DARPA which has already received mention in several posts on this blog (June17, September 23 and November 8, all of 2017).
The Harvard engineers working on the VAMPS and FOAMs are also testing their designs in a variety of different environments. In doing so they hope to be able to demonstrate that their innovations can be employed anywhere from the deepest oceans to the rigors of outer space. If you’d like to learn more about the work going on at the Wyss Institute click on the link below to be taken to the official website.
https://wyss.harvard.edu/artificial-muscles-give-soft-robots-superpowers/